Lokális alacsony dimenziós viselkedés a légkörben
A légkört az elsők között szokás említeni a természetben előforduló kaotikus rendszerekre hozott példák között, ami elsősorban Edward Lorenz munkásságának köszönhető [1]. Ma már széles körű ismeretnek számít az is, hogy az időjárás-előrejelzések pontosságát a légkör kaotikus természete határolja be. Ha azonban a cikksorozat bevezető írásában [2] megfogalmazott definíciót követjük – miszerint a káosz egyszerű rendszerek bonyolult időbeli viselkedése –, akkor e megállapítás tudományos korrektsége egyáltalán nem nyilvánvaló. A légkör ugyanis egy sok összetevőjű, nagy fokú szabadságrendszer, melynek fraktáldimenziója ugyan nem ismert, de ha létezik, akkor valószínűleg nagyobb, mint tíz. Cikkünk elsődleges célja annak bemutatása, hogy a mérsékelt égöv időjárását meghatározó légköri képződmények adott földrajzi környezetében a légkör gyakran úgy viselkedik, mint egy kevés összetevőből álló kaotikus rendszer. Valójában ez teszi lehetővé, hogy a légkört a kaotikus rendszerekre kidolgozott elméleti módszerekkel tanulmányozzuk.
A légkört szimuláló
dinamikai rendszerek
A légkör fizikai modellje egy összenyomható és súrlódó folyadék, melynek mozgását egy állandó szögsebességgel forgó koordinátarendszerben (a Földön) kívánjuk leírni. E fizikai modell matematikai megfogalmazása egy parciális differenciálegyenlet-rendszerhez vezet, ami azt jelenti, hogy az egyenletrendszer megoldásához kezdeti és peremfeltételeket kell biztosítani. A kezdeti feltételek írják le a légkör állapotát az előrejelzés kezdetének időpontjában, míg a peremfeltételek írják le a kölcsönhatásokat az előrejelzési tartomány és annak környezete között. Ha például a teljes földgolyóra kívánunk előrejelzést készíteni, akkor a peremfeltételek írják le a kölcsönhatásokat a légkör, az alatta elterülő földfelszín és az óceánok, valamint az előrejelzési tartomány és a magasabb légrétegek között. Ha csak egy korlátozott térségre (például Európára) készítünk előrejelzést, akkor a peremfeltételek határozzák meg a kölcsönhatásokat a korlátozott előrejelzési tartományon belül és kívül eső légköri térségek között is.
A légkör mozgását leíró egyenletrendszer vizsgálata egyáltalán nem lezárt matematikai probléma [3]. Mindemellett a tapasztalat azt mutatja, hogy a számítógépes közelítő módszerekkel előállított megoldások reálisan képesek szimulálni a légkör mozgását. A közelítő megoldásokat szolgáltató számítógépes programokat numerikus előrejelző modelleknek nevezzük. A modellek az egyenleteket egy rögzített rácson oldják meg, vagyis az általuk nyújtott előrejelzések felbontása véges. A legújabb globális modellek tipikus horizontális felbontása 50–100 km, míg a korlátozott tartományú modelleké 1–30 km. Legtöbb modell 25–70 vertikális szinttel fedi le a légkör alsó 20–40 km-es rétegét, ami azt jelenti, hogy a rácspontok száma a százezres-milliós nagyságrendbe esik. A független változók száma az egyes rácspontokban öt, vagy annál több, a modelltől függően. Ezek a változók általában a szélvektor nyugat–keleti és dél–északi komponense, a hőmérséklet, a felszíni nyomás, valamint a vízgőz, a folyékony halmazállapotú víz, és az ózon koncentrációja a légkörben. Mindez azt jelenti, hogy az időjárás előrejelzését szolgáló dinamikai rendszerek dimenziója (a modellváltozók száma) a milliós nagyságrendbe esik. Ez azonban nem jelenti automatikusan azt, hogy a modell állapotát jellemző fázispont is egy hasonlóan magas dimenziós felületen fejlődik. Ugyanis az egyes változók időbeli fejlődését gyakran a többi változó egy szűk csoportja határozza meg. Noha az operatív gyakorlatban használt modellek fraktáldimenzióját nem ismerjük, a megfigyelési adatokra és az egyszerűsített modellekre végzett becslések arra utalnak, hogy ha egy fraktáldimenzió létezik, akkor az nagyságrendekkel is kisebb lehet a modellváltozók számánál.
Fontos megjegyezni, hogy a modellek a felbontásuknál kisebb skálán zajló légköri folyamatok hatását is megkísérlik figyelembe venni, ún. parametrizációk segítségével. A parametrizációk kidolgozása igen komplex probléma, mivel a felbontatlan skálák mozgása gyakran turbulens, ami szélsőségesen nagy szabadsági fokú viselkedésre utal. A helyzet azonban nem reménytelen, s ezt legegyszerűbben egy a termodinamikából vett példa segítségével lehet megérteni. A statisztikus fizikából tudjuk, hogy egy gáz makroszkopikus hőmérsékletét a gázt alkotó molekulák egy szabadsági fokra jutó átlagos mozgási energiája határozza meg. Noha a mozgási energiát gyakorlatilag lehetetlen meghatározni a Brown-mozgást végző egyedi molekulák sokaságára, a termodinamika törvényei általában kellő pontossággal le tudják írni a hőmérséklet makroszkopikus változásait. A kis skálájú turbulens mozgások nagy térségű folyamatokra gyakorolt hatását általában a statisztikus fizika módszereihez hasonló eszközökkel modellezzük.
Előrejelezhetőség a légkörben
A légköri modellek érzékenyek a kezdeti feltételekre és az általuk nyújtott előrejelzések az idő előrehaladtával egyre kevesebb hasznos információt tartalmaznak. A modellek ezen tulajdonságát a legegyszerűbben úgy mutathatjuk be, hogy paralel modellszimulációkat futtatunk csekély mértékben eltérő kezdeti állapotokból. Ha feltesszük, hogy az egyik szimuláció a légkör valós fejlődését írja le, akkor a többi szimuláció ettől való eltérése modellezi az előrejelzési hiba időbeli változását. A hatvanas évek végén és a hetvenes évek elején végrehajtott előrejelezhetőségi kísérletek azt mutatták, hogy a párhuzamos modellfutások közötti csekély kezdeti eltérés exponenciálisan nő az idővel [1]. Ebben az értelemben tehát a légkör egyértelműen úgy viselkedik, mint egy kaotikus rendszer. (A vonatkozó tudománytörténeti részletekért lásd [4]).
Numerikus modell-előrejelzéseket készíteni drága (számítástechnikai költségek, sokéves fejlesztő munka, nagy felbontású légköri megfigyelő rendszerek fejlesztése és fenntartása stb.), sokkal többe, mint például egy nagy éghajlati adatbázisban keresni adatokat. Számítógépes előrejelzéseket csak akkor érdemes készíteni, ha a modellek pontosabb előrejelzéseket adnak, mint egy éghajlati adatbázisból előkereshető adat. A hatvanas évek végére nyilvánvalóvá vált, hogy néhány (kb. 1–7) napos távon a modellek jobb előrejelzéseket adnak annál a prognózisnál, amely a sokéves (klimatológiai) átlagon alapul. Azonban az is nyilvánvalóvá vált, hogy a hosszabb előrejelzési távokra a sokéves átlag fokozatosan növekvő előnyre tesz szert a modellekkel szemben.
E jelenség magyarázata a kezdeti feltételekre való érzékenységben rejlik: két, kezdetben alig megkülönböztethető értékből indított előrejelzés egy idő után (amit előrejelezhetőségi időhatárnak nevezünk) annyira eltérő előrejelzéshez vezet, amekkora az eltérés a légkör két véletlenszerűen választott, de éghajlatilag lehetséges állapota között. A matematikai statisztika eszközeit felhasználva meg lehet mutatni, hogy az előrejelezhetőségi határon túl egy tetszőlegesen választott légköri paraméter előrejelzésében a várható négyzetes hiba (a leggyakrabban használt objektív mérték az előrejelzés hibájának mérésére) kétszer nagyobb a modell, mint az éghajlati előrejelzés esetén. Ennek az érdekes eredménynek az a magyarázata, hogy a modellel a meteorológiai mezők olyan részleteit kíséreljük meg előre jelezni, amelyeket nem lehet meghatározni a kezdeti feltételekre való érzékenység miatt. Más szóval, az objektív verifikációs eredmények arra figyelmeztetnek, hogy az időjárás változásában bekövetkező előre jelezhetetlen részleteket nem szabad megpróbálni előre jelezni.
Együttes (ensemble)
előrejelzési technika
Az elmondottak alapján egy modell-előrejelzés teljesen értéktelenné válik, ha nem tudjuk, hogy melyek azok a részletek, amelyek előre jelezhetők és melyek azok, amelyek nem. Az előrejelzések nyilvánvalóan javulnának, ha ki tudnánk szűrni az előre jelezhetetlen részleteket. Az is világos, hogy az előre jelezhetőségi időhatáron túl minden olyan részletet ki kell szűrni, ami eltér a sokéves átlagtól. A megoldást az együttes (ensemble) előrejelző rendszerek bevezetése jelentette, melyek gondolata már a hetvenes évek elején felvetődött [5], de a számítógépek sebessége csak a kilencvenes évek elején tette lehetővé a gyakorlati bevezetést [6], [7].
Az együttes előrejelzés onnan kapta a nevét, hogy egy egyedülálló modell-előrejelzés helyett a modell-előrejelzések együttesén alapul. Az együttes tagjai olyan előrejelzések, amelyek kis mértékben eltérő kezdeti feltételekből indulnak ki. A köztük levő kezdeti eltérés a kezdeti érték meghatározásában rejlő bizonytalanságot szimulálja. Az előrejelzési idő előrehaladtával az előrejelzések közötti eltérések fokozatosan nőnek az előrejelzési időhatár eléréséig. A matematikai statisztika módszereivel megmutatható, hogy az előrejelzési időhatárnál rövidebb időtartamokra az optimális előrejelzést az előrejelzések együttes átlaga adja. Az együttes átlag egy optimális nemlineáris szűrő, amely figyelembe veszi az előre jelezhetőség meteorológiai helyzettel és előrejelzési időtartammal való változását [5].
Meg kell jegyezni, hogy az együttes előrejelzés sokkal összetettebb információk biztosítására is képes, mint az egyszerű átlag. Az együttes előrejelzés egy valószínűséget rendel minden meteorológiai eseményhez. Egy együttes előrejelző rendszerrel elvileg előre tudja jelezni, hogy adott napon mekkora az esély a különböző mennyiségű csapadékösszegek hullására [8].
Az ensemble előrejelzések készítésének számításigénye hatalmas. Ezért az elmúlt évtizedben számos kísérlet célozta annak meghatározását, hogy a növekvő számítási kapacitásokat hogyan lehetne optimálisan használni az ensemble előrejelzés javítására. Az egyik lehetőség az együttes tagok számának növelése volt. A kísérletek arra az érdekes eredményre vezettek, hogy a globális modellek esetén az előrejelző rendszer minőségét már nehéz javítani újabb tagok hozzáadásával, ha azok száma eléri a 20-25-öt, míg 50-nél tovább egyáltalán nem érdemes növelni a tagok számát [9]. Ez azt mutatja, hogy noha a modell szabadsági fokainak száma a milliós nagyságrendbe esik, a kezdeti értékekben rejlő bizonytalanságok hatása egy viszonylag alacsony dimenziós instabil térben fejlődik.
Spagettidiagramok
Az időjárási jelenségek előrejelezhetősége térben és időben erősen változik. Az együttes előrejelzések segítségével ezt a változékonyságot meg is lehet jeleníteni spagettidiagramok formájában. Erre egy példát az 1. ábra mutat be. A spagettidiagramon egy adott időpillanatra a légkör egy kiválasztott állapothatározóját izovonalas formában ábrázoljuk úgy, hogy a kiválasztott izovonalat minden egyes együttes tagra felrajzoljuk. Az ábrán minden egyes együttes tagot egyetlen vonal reprezentál. Példánkban három különböző izovonalat választottunk ki, amelyeket eltérő módon jelöltünk.
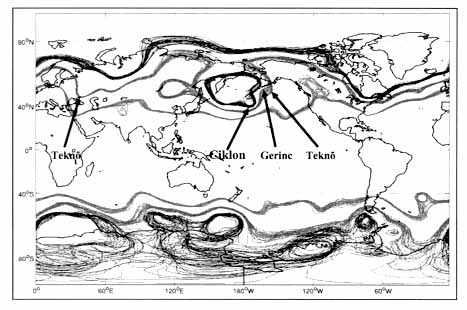
1. ábra. A spagettidiagram 2000. február 6-án 0000 UTC (éjfél Greenwichben)
időpontban. Az izovonalak az 500 hPa nyomási szint magasságát mutatják.
Gyakorlati szempontból a geopotenciális méter (gpm) a méterrel azonos egységnek
tekinthető
A meteorológusok leggyakrabban izohipszákkal jelenítik meg a meteorológiai áramlásokat. Az izohipszák azokat a pontokat kötik össze, amelyekben egy adott légköri nyomási szint azonos magasságban helyezkedik el. Az izohipszák népszerűsége abban rejlik, hogy a légköri áramlás (jó közelítésben a légkör alsó pár száz méterét leszámítva) az izohipszákkal párhuzamos, mégpedig úgy, hogy az áramlás irányába nézve a magasabb értékek jobb kéz felé esnek. Példánkban azokat a pontokat jelenítettük meg, ahol az 500 hPa-os (mb-os) nyomási szint 5100, 5280 és 5580 méteres magasságban helyezkedik el. Megjegyezzük, hogy az 500 hPa-os nyomási szint reprezentálja a legjobban a tipikus légköri mozgásokat a troposzférában, ami a légkör legalsó 8–12 km-es rétege, ahol az időjárás zajlik.
A bemutatott helyzet, hogy a magassági értékek általában a pólusoktól az Egyenlítő irányába növekednek, a légkör általános tulajdonsága. Jól látható viszont, hogy az alacsony területek helyenként mélyen benyúlnak az általában magas földrajzi szélességekre, a magas területek benyúlhatnak az általában alacsony területek földrajzi szélességeire. A meteorológiai zsargonban az előbbieket teknőknek, míg az utóbbiakat gerinceknek nevezzük. Ezeket az elnevezéseket könnyen megérthetjük, ha az izohipszákat úgy képzeljük el, mint magassági szintvonalakat egy domborzati térképen. (Amint azt az 1. ábra is jól szemlélteti, a teknők és gerincek tengelye nem feltétlenül párhuzamos a földrajzi hosszúságokkal.)
A mérsékelt övi ciklonok kialakulását sematikusan úgy magyarázhatjuk, hogy a teknők fokozatosan kimélyülnek, és a légkör alsóbb rétegeiben zárt izohipszák jelennek meg. Ez a folyamat – melynek során a légkör hasznosítható potenciális energiája kinetikus energiává alakul – a legfontosabb instabilitás a mérsékelt égövben. A példánkban bemutatott napon a legérdekesebb ciklon a dátumválasztó vonal (180° hosszúság) mentén a 40° északi szélességtől északra helyezkedik el. Ez a ciklon Alaszka irányába mozog, ahol hamarosan jelentős csapadékot okoz. A szóban forgó területen (B régió a 2. ábrán) az egyes együttes tagok közötti eltérés jelentős, noha az eltérés struktúrája „nagyon egyszerű”. Ez utóbbin azt értjük, hogy az egyes együttes tagok között a különbség elsősorban a ciklontól északkeletre elhelyezkedő hullám helyzetében van: egyes tagok szerint a hullám gerincet, míg más tagok szerint teknőt képez. E kezdeti bizonytalanság gyakorlati következménye az, hogy nem lehetünk bizonyosak abban, hogy a ciklon mikor fogja elérni Alaszkát, és némi bizonytalanság rejlik a ciklon intenzitásában is. Megjegyezzük, hogy a Kelet-Európa felett elhelyezkedő teknő (A régió a 2. ábrán) helyzetében is hasonlóan egyszerű szerkezetű bizonytalanság rejlik.
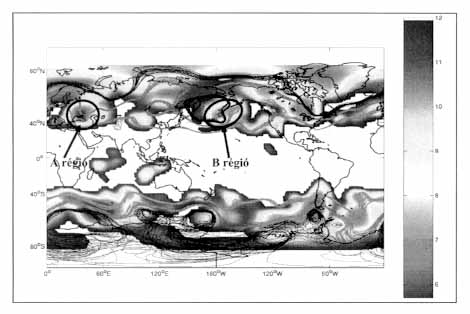
2. ábra. A BV-dimenzió és a spagettidiagram 2000. február 6-án 0000 UTC (éjfél Greenwichben) időpontban. A spagettidiagram paraméterei azonosak az 1. ábrán bemutatottal, míg a BV-dimenzió értékei az ábra jobb oldalán elhelyezett skáláról olvashatók le
A spagetti viselkedése a déli féltekén a magas szélességek területén az említett esettől lényegesen eltér. Itt is nagy az eltérés az egyes együttes tagok között, de az előbbi esettel ellentétben az eltérés struktúrája meglehetősen komplex.
Lokális alacsony dimenziós
viselkedés
Az ismertetett megkülönböztetés egyszerű és bonyolult bizonytalansági struktúrák között elég szubjektív. E szubjektivitás kiküszöbölésére vezette be a University of Maryland egy kutatócsoportja a BV-dimenzió fogalmát. (A BV-dimenzió pontos matematikai definícióját lásd [10].) A BV-dimenzió egy lokális mennyiség, melynek értéke „lassan” változik rácspontonként. A BV-dimenzió alacsony azokon a helyeken, ahol a bizonytalansági struktúra egyszerű, és magas, ahol a bizonytalansági struktúra komplex az ensemble-on belül. Fontos megjegyezni, hogy a BV-dimenzió nem a bizonytalanság lokális nagyságát (az együttes tagjai közötti távolságot), hanem annak lokális struktúráját jellemzi: a dimenzió lehet szélsőségesen magas vagy alacsony, a bizonytalanság mértékétől függetlenül. (A BV-dimenziót nem szabad összekeverni a káosz kapcsán gyakran említett fraktáldimenzióval, amely a fizikai rendszerek egy globális tulajdonsága!)
A BV-dimenzió és a spagettidiagram viszonyát a 2. ábra mutatja be. A dimenzió értékét ebben az esetben 2,5°-os felbontással határoztuk meg úgy, hogy az összes modellváltozót figyelembe vettük az egyes rácspontok kb. ezer kilométeres környezetében, a légkör kb. 12 km-es alsó rétegében. Ezen változók száma 1600, ami lényegesen meghaladja az ábrán bemutatott BV-dimenziókat. A teljesség kedvéért megjegyezzük, hogy a BV-dimenzió nem képes az együttes tagjainak számánál magasabb dimenziók detektálására. Feltehetjük, hogy a bemutatott értékek pontosan becsülik az alacsony dimenziós területek dimenzióját. A 12-nél magasabb lokális dimenziókat azért nem mutatjuk, mert azok becsült értéke még jelentősen változott, amikor növeltük az együttes tagjainak számát.
Látható, hogy azokon a területeken, ahol a bizonytalanság struktúrája nyilvánvalóan egyszerű, a BV-dimenzió alacsony, és azokon a területeken, ahol a bizonytalansági struktúra nyilvánvalóan komplex, a BV-dimenzió magas. Viszont az is jól látható, hogy vannak területek, ahol a bizonytalanság kicsi, és a BV-dimenzió segítsége nélkül nem tudnánk megmondani, hogy a struktúrája mennyire komplex. Szintén érdemes megjegyezni, hogy az alacsony földrajzi szélességeken a BV-dimenzió magas (noha az ensemble mérete elégtelen a dimenzió pontos becslésére ezen a területen). Ennek fizikai magyarázata az, hogy a trópusokon az előrejelzések bizonytalansága kisebb skálájú konvektív rendszerekhez kapcsolódik. Ezért ezen a területen a 2,5°-os felbontás mellett meghatározott bizonytalansági struktúrák nem rendezettek.
A konvektív légköri rendszerek szerepe az, hogy kiegyenlítsék a hőmérsékleti különbséget a Föld felmelegedő felszíne és hidegebb légköre között. Konvektív légköri rendszerek a mérsékelt égövben is előfordulnak, ahol a legismertebb megjelenési formáik a nyári záporok és zivatarok kialakulásához vezető légköri áramlási rendszerek. Míg azonban a trópusokon a konvektív rendszerek a legfontosabb fizikai instabilitások, addig a mérsékelt égövben az általuk felszabadított mozgási energia általában elhanyagolható a ciklogenezisek térségében felszabadított mozgási energiához képest. Megjegyezzük, hogy a viszonylag kis horizontális kiterjedésű (1–10 km nagyságrendű) konvektív rendszerekkel ellentétben a nagy térséget (1000 km nagyságrendet) átölelő ciklogenezis nem a vertikális, hanem az észak–dél irányú hőmérsékleti különbség határa jön létre.
Az alacsony dimenziós viselkedés
gyakorlati jelentősége
A számítógépes előrejelzéseket évről évre csak igen csekély mértékben tudjuk javítani. Ennek alapvetően két fontos oka van. Egyrészt vannak olyan meteorológiai jelenségek, amelyek megértésével alapvető elméleti problémáink vannak (pl. a kis skálájú turbulens folyamatok), és ezeket a modellek eleve nem képesek pontosan szimulálni. Másrészt vannak olyan jelenségek, amelyekre már nagyon közel járunk az előrejelezhetőség elvi határához, mert időbeli fejlődésüket a modellek pontosan képesek előre jelezni, de az őket meghatározó kezdeti állapotokat már nem tudjuk tovább pontosítani (pl. az észleléseket végző műszerek behatárolt pontossága miatt). Ezért alapvető fontosságú, hogy képesek legyünk azon jelenségek azonosítására, amelyek előrejelzése számottevően javítható még a kezdeti értékek pontosabb meghatározásán keresztül.
E gondolat megértéséhez azt is tudni kell, hogy miként készülnek a numerikus modell-előrejelzések kezdeti feltételei. A kezdeti feltételek elkészítésének folyamatát analízisnek hívjuk. Ennek során a kezdeti feltételeket egy statisztikus interpoláció adja, amely egy rövid távú (a globális előrejelző modellek estén általában 6 órás) előrejelzés és az aktuális megfigyelések optimális kombinációját igyekszik meghatározni. Ezt a folyamatot úgy képzelhetjük el, hogy a folyamatosan készített rövid távú előrejelzéseket a megfigyelési adatokkal korrigáljuk, ahol azok a rendelkezésünkre állnak. E korrigált előrejelzések adják a kezdeti feltételeket a hosszabb távú (1–21 napos) előrejelzésekhez (további részletekért lásd [11]).
A rövid távú (6 órás) előrejelzés szerepe az, hogy az észlelt adatok hatását a modell-légkör azon területeire is eljuttassa, ahol nincsenek megfigyelő eszközök. Fontos azonban észrevenni, hogy a légkör (és a modellek) kaotikus természete miatt a légköri állapot meghatározásának hibája gyakran nagyobb a rövid előrejelzés végén, mint annak kezdetén. Ha egy adott pontban nincs megfigyelés, hogy e növekvő hibát eltávolítsuk a kezdeti feltételből, akkor a hiba a következő rövid távú előrejelzésben tovább növekedhet. E folyamat eredménye az, hogy azokon a területeken, ahol nagyon kevés a megfigyelés és a kezdeti hibák gyorsan nőnek, hibák jelenhetnek meg a kezdeti értékekben. (Ezeket szimulálják az ábrákon spagettidiagrammal bemutatott ensemble kezdeti feltételek.) Ezek a hibák tovább növekednek a többnapos előrejelzésekben, ami egyes területeken gyorsan megjelenő és jelentős előrejelzési hibákat eredményez. E probléma gyakorlati súlyát az adja, hogy a kezdeti hibák a leggyorsabban a ciklogenezisek területén növekszenek. Viszont a legtöbb mérsékelt övi ciklon (és az összes trópusi ciklon) az óceánok felett születik, ahol a megfigyelt adatok sűrűsége gyakran elenyésző. Noha ezen a problémán jelentősen enyhített a műholdas megfigyelő rendszerek bevezetése, a ciklogenezisek területe általában vastag felhővel takart, ami nagyban korlátozza a műholdas megfigyelések lehetőségeit.
A lokális alacsony dimenziós viselkedés gyakorlati jelentősége az, hogy az említettek alapján feltételezhetjük, hogy a kezdeti értékekben gyakran fordulnak elő nagy, de egyszerű struktúrájú hibák. Ha sikerül olyan módszereket találni, amikkel ezek az egyszerű struktúrájú nagy hibák csökkenthetők, akkor jelentős javulást várhatunk a ciklonok előrejelzésében. Az egyik lehetséges módszer az, hogy a várható egyszerű hibastruktúrát figyelembe vesszük a rövid távú előrejelzések korrekciója során. Ennek a módszernek a matematikai alapjai már léteznek [12] és a gyakorlati megvalósítás jelenleg folyamatban van. A másik lehetséges módszer, hogy „célzott megfigyeléseket” irányítunk az egyszerű struktúrájú, de várhatóan nagy hibák térségébe, hogy növeljük az észlelt adatok korrekciós hatását.
Bár ez utóbbi sokak számára futurisztikus elképzelésnek tűnhet, tény, hogy ilyen észleléseket kísérleti jelleggel 1997 tele óta [13], [14], míg operatívan 2002 januárjától [15], [16] végeznek az Egyesült Államokban. (Noha a célzott megfigyelések kezdetekor az objektív mérőszám, a BV-dimenzió még nem létezett a komplexitás mérésére.)
Az operatív program keretében alaszkai és hawaii légi bázisokon elhelyezett repülőket irányítanak a legfontosabbnak vélt meteorológiai folyamatok térségébe a Csendes-óceán felett. A repülők ejtő szondákat dobnak le meghatározott sűrűséggel, amelyek ejtőernyővel ereszkedve folyamatosan végzik a légköri méréseket, amíg el nem érik az óceán felszínét. A szondák mérési eredményeit műholdak gyűjtik és továbbítják a nagy előrejelző központoknak, ahol azokat rögtön felhasználják a kezdeti feltételek előállítására. Az eredmények azt mutatják, hogy ezek az „intelligens módon elhelyezett” megfigyelések átlagosan több (esetenként 12) órával javítják az USA-ban téli hóviharokat okozó ciklonok előrejelzéseit. Jelentős javulások tapasztalhatók a csapadékösszegek előrejelzésében is.
A jövő
A célzott megfigyelési program sikere nagyszabású tervek kidolgozására
sarkallta a nemzetközi meteorológus közösséget, s a jövőt sokan a „megfigyelő
rendszer dinamikus kontrollálásában” látják. Amíg a jelenlegi általános
gyakorlat az, hogy a modellek rögzített helyen és időpontokban észlelt
megfigyeléseket használnak a kezdeti feltételek elkészítésére, a dinamikusan
kontrollált megfigyelő rendszernek a modellekből nyert információk alapján
kellene észleléseket végezni. Az új megfigyelő rendszerben a mobil észlelőplatformok
(pilóta nélküli repülők, sodródó ballonokról távirányítással ledobott ejtő
szondák, bójákról rakétával kilőtt ejtő szondák stb.) sokkal fontosabb
szerepet játszanának, mint jelenleg. Ezek a technikák vagy már léteznek,
vagy a tesztelés kései fázisában vannak. A megálmodott megfigyelő rendszer
kipróbálására várhatóan 2009-ben vagy 2010-ben kerül majd sor a jelenleg
szerveződő és egyévesre tervezett ThORPEX (The Observing System Research
and Predictability Experiment) kísérleti program keretében. E program fejlődését
az érdeklődő olvasók folyamatosan figyelemmel követhetik majd a https://www.mmm.ucar.edu/uswrp/programs/thorpex.html
honlapon. Az új típusú adatok észlelési helyének kiválasztásában, valamint
azok asszimilációjában várhatóan fontos szerepet fognak játszani azok a
technikák, amelyek figyelembe veszik a rövid távú előrejelzésekben várható
egyszerű hibastruktúrákat, vagyis a légkör lokális kaotikus viselkedését.Köszönetnyilvánítás:
Köszönettel tartozom Tél Tamásnak és Gyarmati Györgyinek a cikkel kapcsolatos
hasznos megjegyzéseikért. Az utóbbi jelentős segítséget nyújtott az ábrák
elkészítésében is. Szintén köszönettel tartozom legközelebbi kollégáimnak,
D. J. Patilnek, Aleksey Ziminnek, Eugenia Kalnaynak, Jim Yorkenak, Brian
Huntnak és Edward Ottnak, akikkel az elmúlt másfél évet a légkör lokálisan
alacsony dimenziós viselkedésének tanulmányozásával töltöttük. Kutatásainkat
a W. M. Keck Foundation támogatta.
Irodalom
[1] E. N. Lorenz, The essence of chaos (The University of Washington
Press, 1993).
[2] Tél T. és Gruiz M., Mi a káosz? (és mi nem az?), Természet Világa,
132. évf.
[3] Horányi A., Ihász I. és Radnóti G., Az időjárás számszerű előrejelzése,
Természet Világa, 129. évf., I. Különszám, 39. o., 1998.
[4] C. R. Doering és J. D. Gibbon, Applied Analysis of the Navier-Stokes
Equations. (Cambridge University Press, 1995).
[5] Götz G., Káosz és prognosztika, (Országos Meteorológiai Szolgálat,
Budapest, 2001).
[6] C. E. Leith, Theoretical skill of Monte Carlo forecasts, Monthly
Weather Review, 102. évf., 409. o., 1974.
[7] Toth Z. és E. Kalnay: Ensemble forecasting at NCEP: The generation
of perturbations, Bulletin of the American Meteorological Society, 74.
évf., 2317. o., 1993.
[8] F. Molteni, R. Buizza, T. N. Palmer és T. Petroliagis, The ECMWF
Ensemble Prediction System: Methodology and validation. Quarterly Journal
of the Royal Meteorological Society, 122. évf., 73. o., 1996.
[9] Toth Z. és Szunyogh I.: Miért nem tökéletesek az időjárás-előrejelzések?
Természet Világa, 129. évf., I. Különszám, 45. o., 1998.
[10] R. Buizza, T. Petroliagis, T. N. Palmer, J. Barkmeijer, M. Hamrud,
A. Hollingsworth, A. Simmons és N. Weidi, Impact of model resolution and
ensemble size on the performance of an ensemble prediction system, Quarterly
Journal of the Royal Meteorological Society, 124. évf., 1935. o., 1998.
[11] Dévényi D., A meteorológiai adatok asszimilációja, Természet Világa,
129. évf., I. Különszám, 35. o., 1998.
[12] Patil D. J., B. R. Hunt, E. Kalnay, J. A. Yorke, és E. Ott, Locallow
dimensionality of atmospheric dynamics, Physics Review Letters, 86. évf.,
5878. o.
[13] E. Ott, B. R. Hunt, I. Szunyogh, M. Corazza, E. Kalnay, D. J.
Patil, J. A. Yorke, Exploiting local law dimensionality of the atmospheric
dynamics in eflicient Ensemble Kalman Filtering, https:j jarXiv. orgjabsjphysicsj0203058,
2002.
[14] Szunyogh 1., Toth Z., K. A. Emanuel, C. H. Bishop és társaik,
Ensemble-based targeting experiments during FASTEX, The impact of dropsonde
data from the LEAR jet, Quarterly Journal of the Royal Meteorological Society,
125. évf., 3189. o., 1999.
[15] R. Langland, Toth Z., R. Gelaro, 1. Szunyogh és társaik, The North
Pacific Experiment (NORPEX–98). Bulletin of the American Meteorological
Society, 80. évf., 1363. o., 1999.
[16] Szunyogh 1., Toth Z., R. E. Morss, S. J. Majumdar, B. J. Etherton
és C. H. Bishop, The effect of targeted dropsonde observations during the
1999 Winter Storm Reconnaissance Program. Monthtly Weather Review, 128.
évf., 3520. o., 2000.
[17] Szunyogh 1., Toth Z., A. V. Zimin, S. J. Majumdar és A. Persson,
Propagation of the effect of targeted observations: The 2000 Winter Storm
Reconnaissance program, Monthly Weather Review, 130. évf., 1144. o., 2002.
| Természet Világa, | 133. évfolyam, 12. szám, 2002. december
https://www.chemonet.hu/TermVil/ https://www.kfki.hu/chemonet/TermVil/ |
Vissza a tartalomjegyzékhez